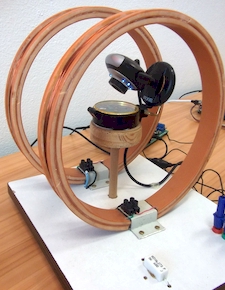
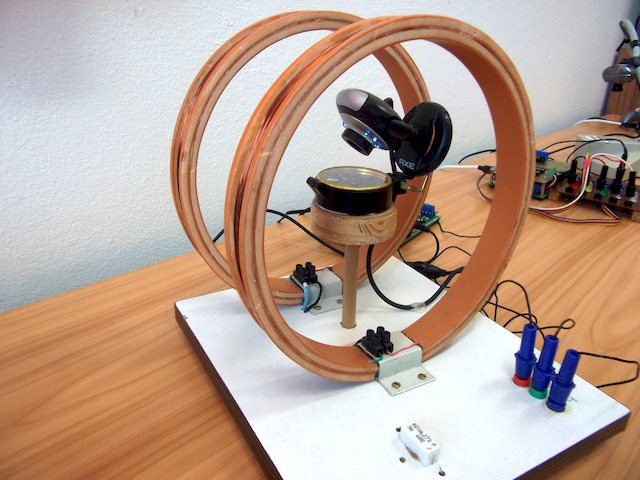
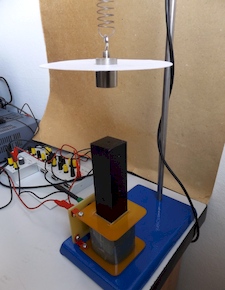
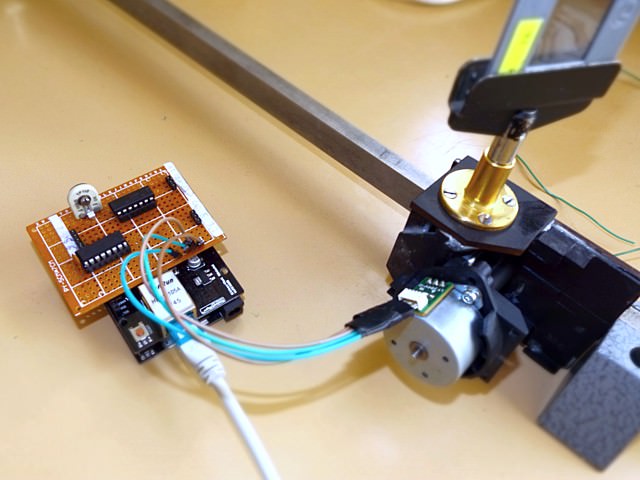
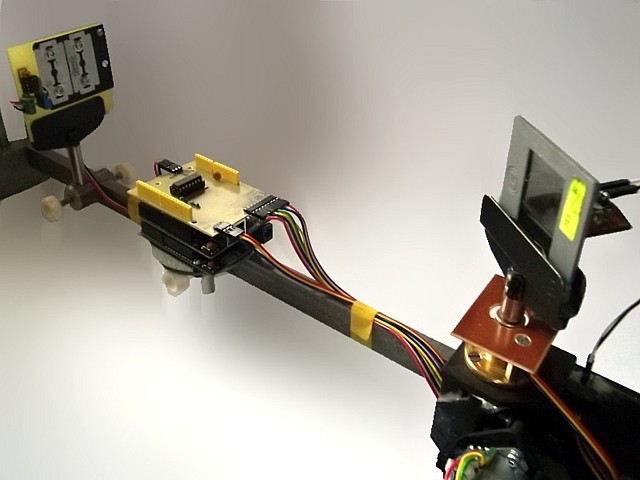
Princip měření této úlohy je založen na standardním postupu měření. Pružinový oscilátor, tvořený pružinou tuhosti k a závažím hmotnosti m, je vychylován z rovnovážné polohy. V případě studia tlumený kmitů stačí soustavu „rozhoupat“, pak přestat budit a sledovat její vlastní kmitání. Z časového záznamu okamžité výchylky kvaziperiodického pohybu tlumeného kmitání lze určit součinitel tlumení δ. V případě, že vyšetřujeme závislost amplitudy na budící frekvenci (nucené kmitání), budeme sledovat průběh okamžité výchylky při různých budících frekvencích budící síly.
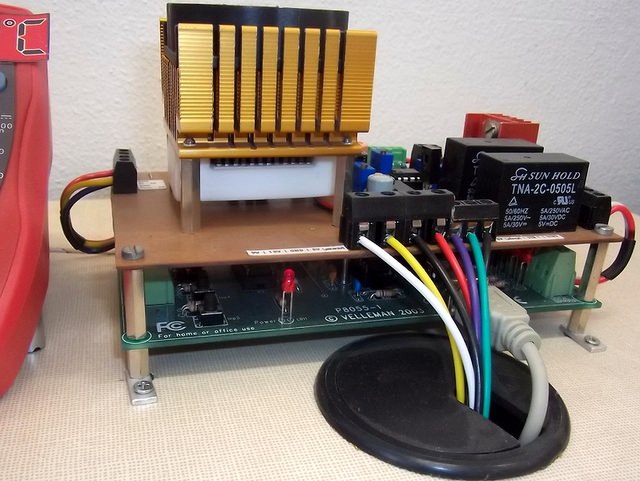
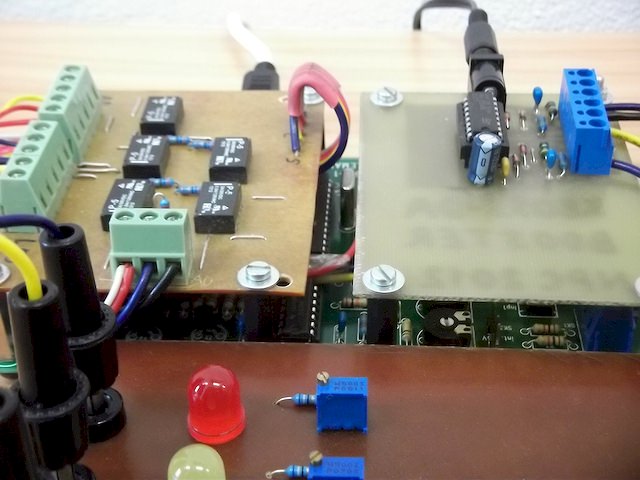
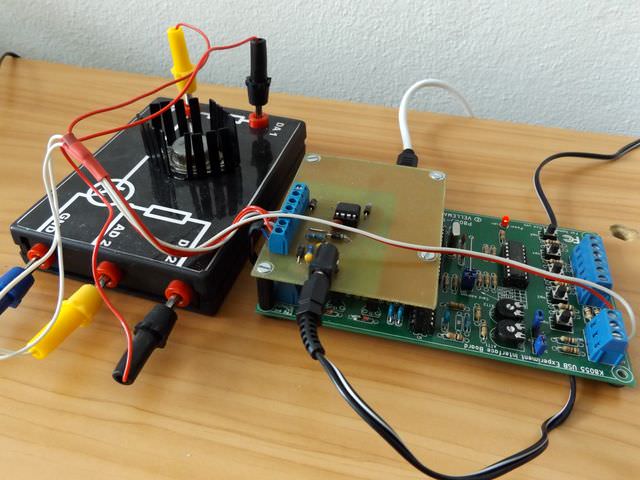
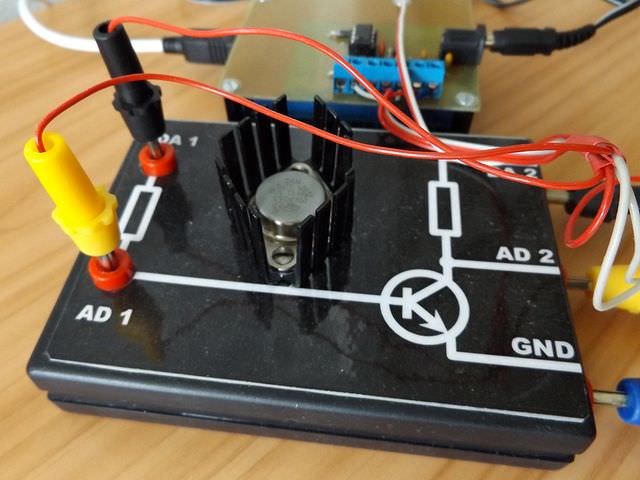
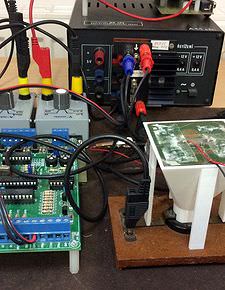
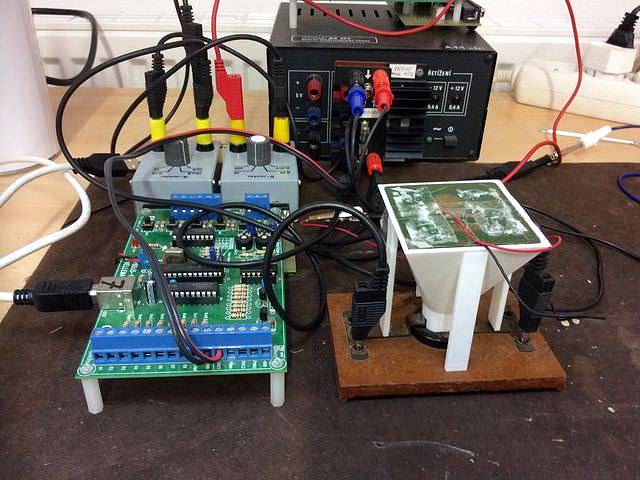
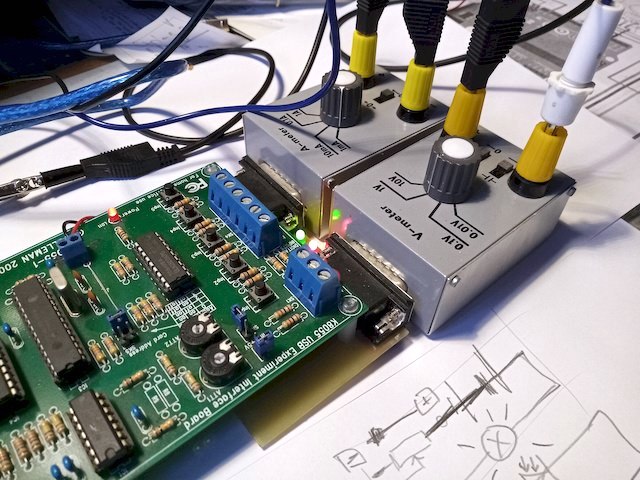
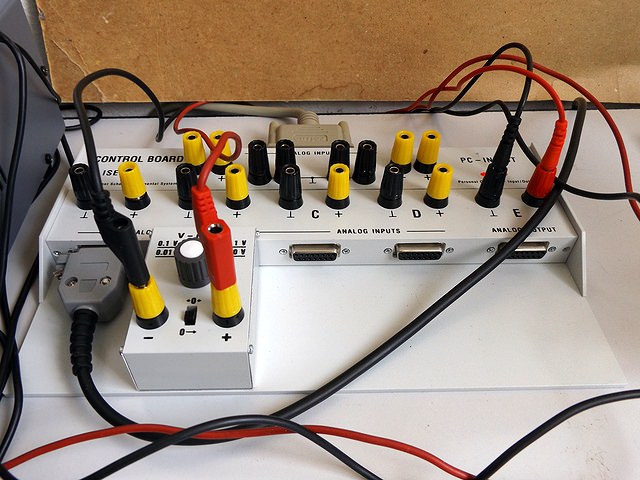
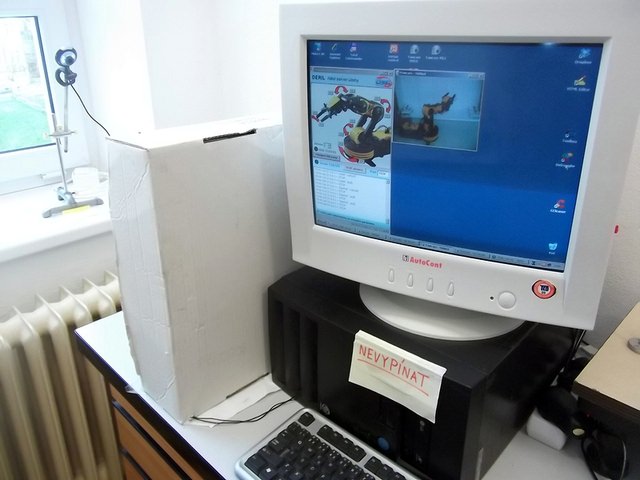
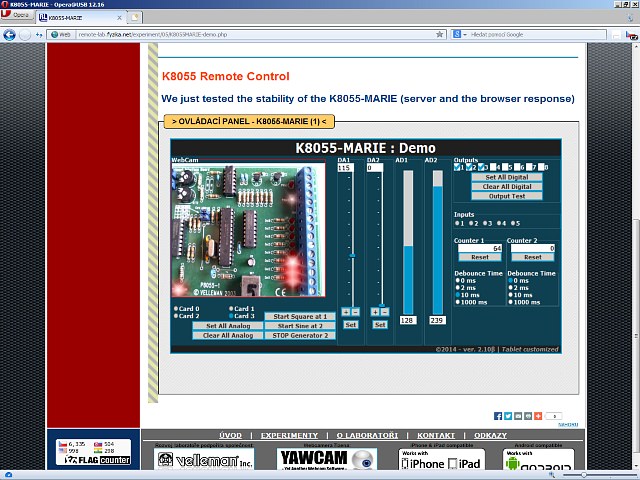
Pro potřeby změny budící frekvence pomocí počítače je cívka napájena řiditelným napájecím zdrojem střídavého proudu. Řídicí signály pro zdroj, stejně tak jako načítání okamžité výchylky oscilátoru, obsluhuje experimentální souprava ISES. Tato souprava disponuje několika vstupními a výstupními porty, na které lze připojovat různé experimentální moduly – voltmetr, ampérmetr, tenzometr… apod. Experimentální systém ISES je doplněn softwarovou stavebnicí iSES Web Control, pomocí které je vytvořeno vzdálené internetové řízení úlohy.
Teorie
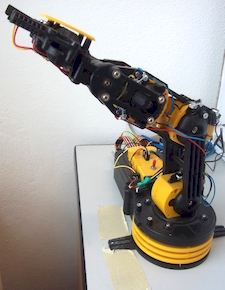
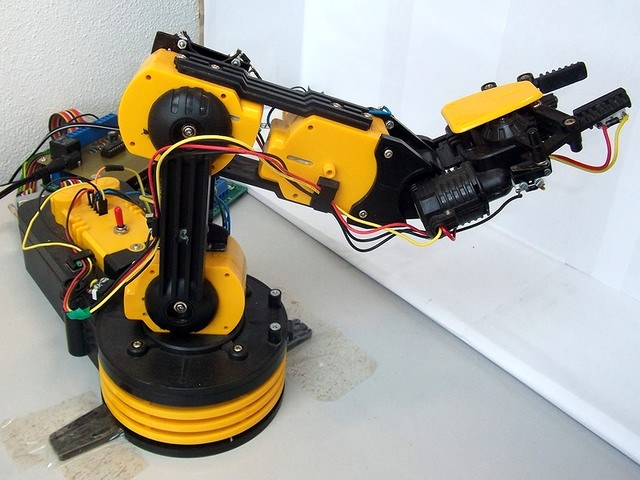
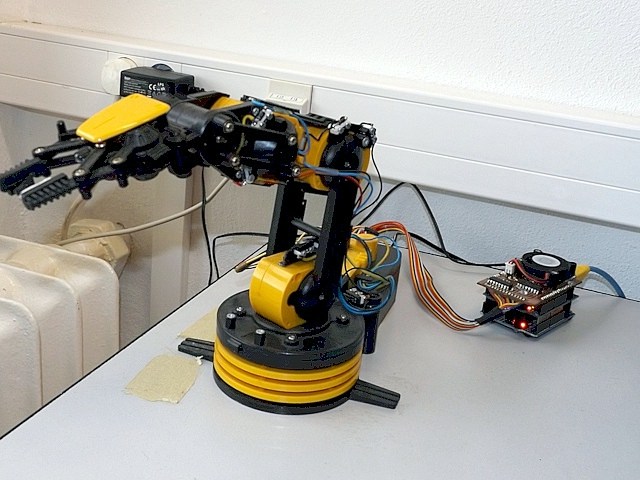
Aparatura
Pracovní úkol
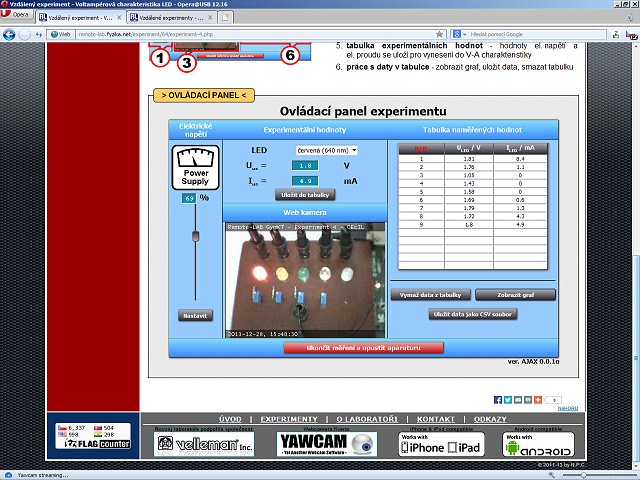
Spustit experiment
Vznik tohoto experimentu byl podpořen z Evropského fondu pro regionální rozvoj - CZ.1.14/2.4.00/34.03174, Vybavení pro posílení přírodovědně technického vzdělávání