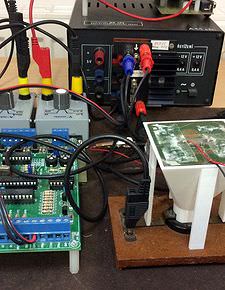
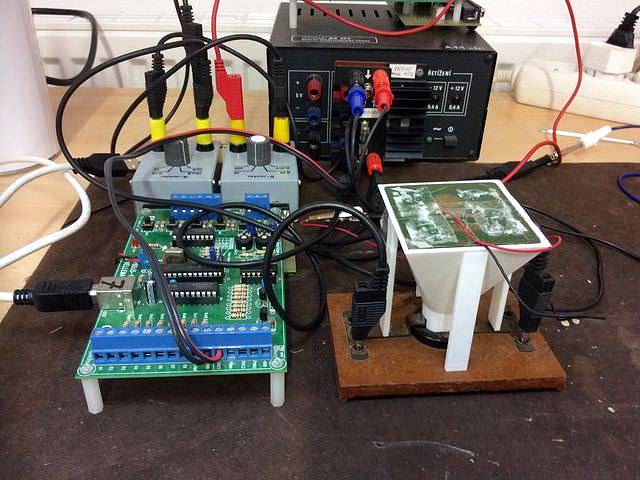
A remote experiment allows you to measure the load characteristics of two commonly used electrochemical sources – alkaline and zinc chloride batteries. An incrementally increasing current is drawn from both electrically charged batteries. Each value of the drawn current is measured simultaneously with the value of the corresponding terminal voltage. After plotting the pairs of current-voltage values on the graph, we get the dependence of the terminal voltage on the drawn current – the so-called load characteristic of the source. The shape of this dependence is influenced by the internal structure of the battery cells, which can be described electrically by the basic parameters of the source – electromotor voltage, internal resistance (or short-circuit current).
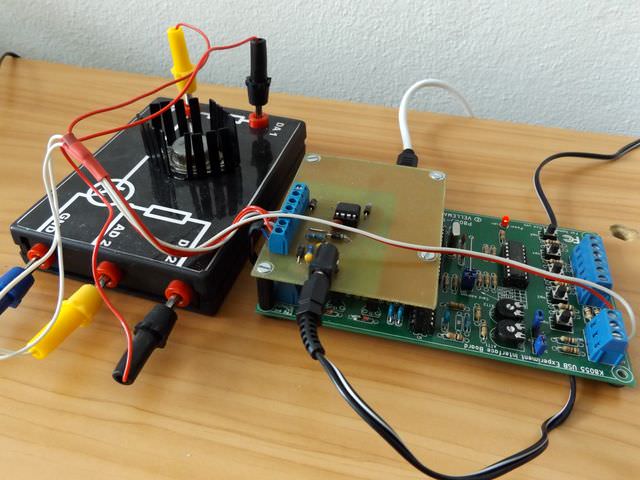
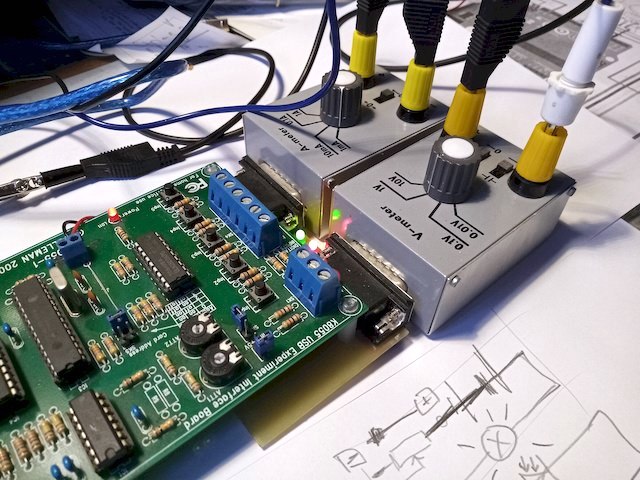
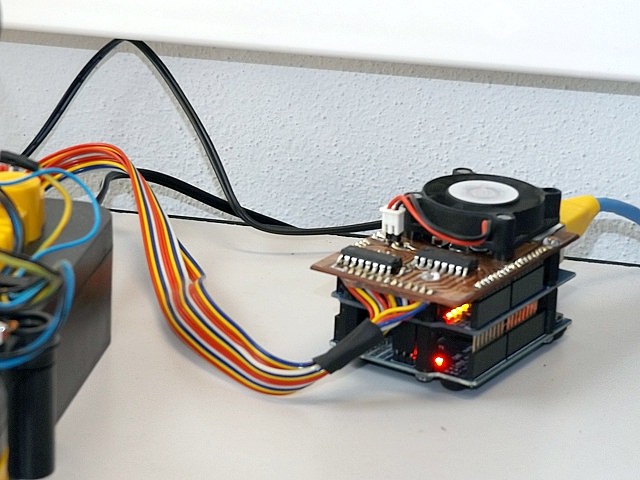
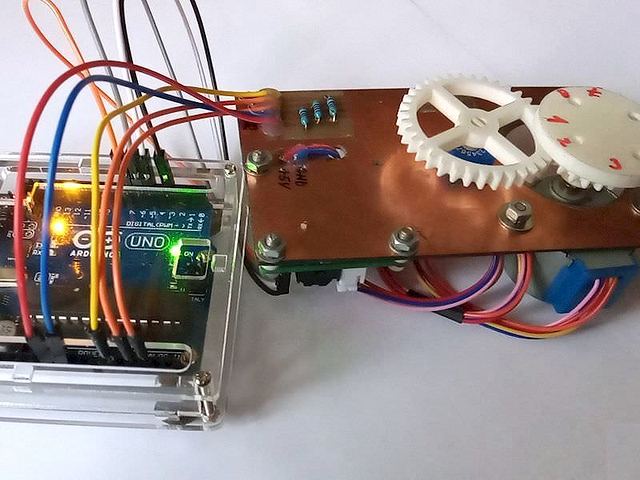
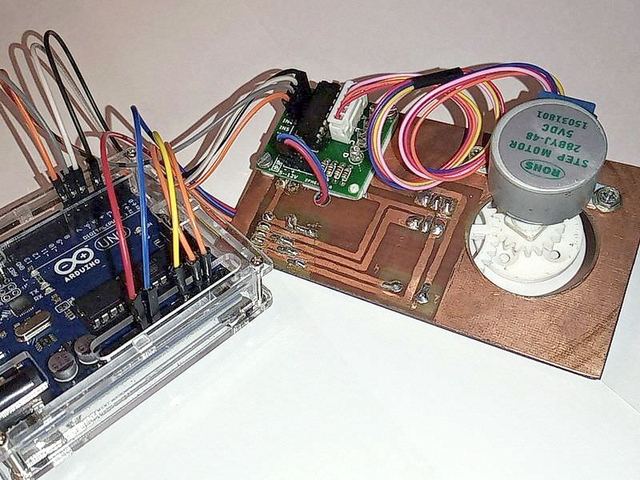
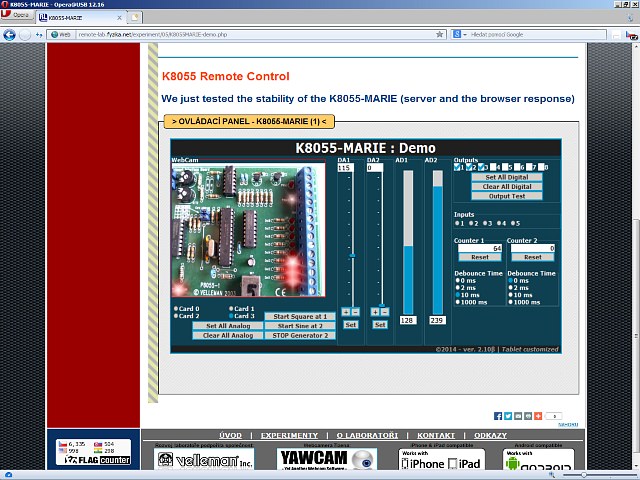
The role was developed by our students in the competition: Technical Olympics of the Pilsen Region. The measurement of the task is again based on the proven K8055 USB board, but a new method of remote communication is used for control. This method is based on our original K8055-MARIE application (version 2), but uses new techniques. This has ensured backward compatibility with the original control, but with significant acceleration and increased remote control efficiency of the connected experiment. Gradually, all other tasks will be transferred, and after successful testing, this version will be released to other developers as other versions of the K8055-MARIE.
Theory
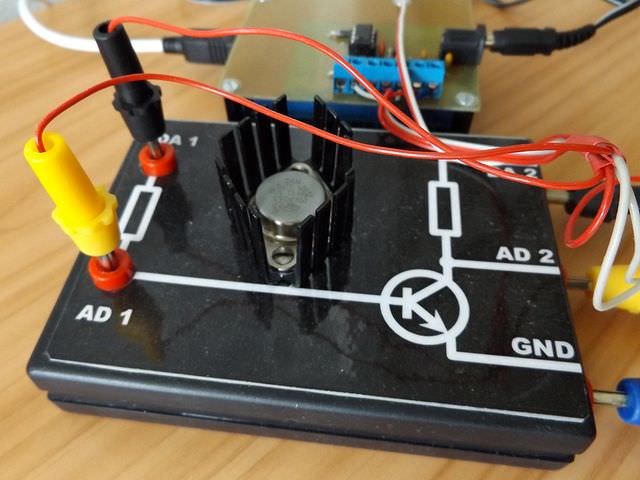
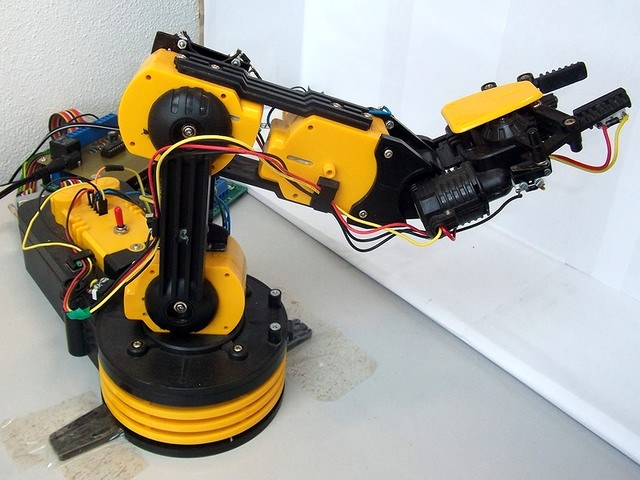
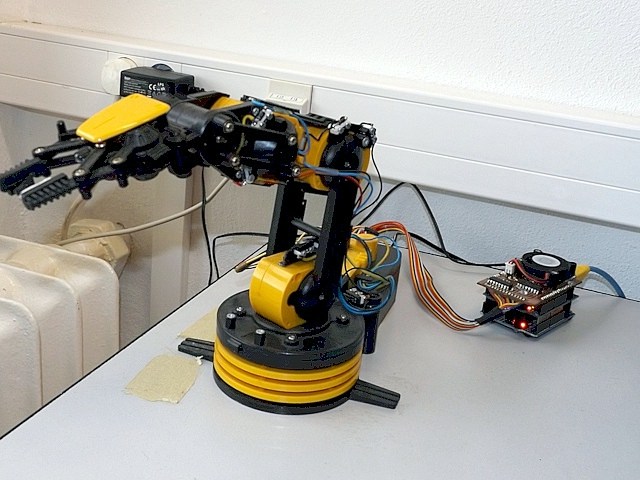
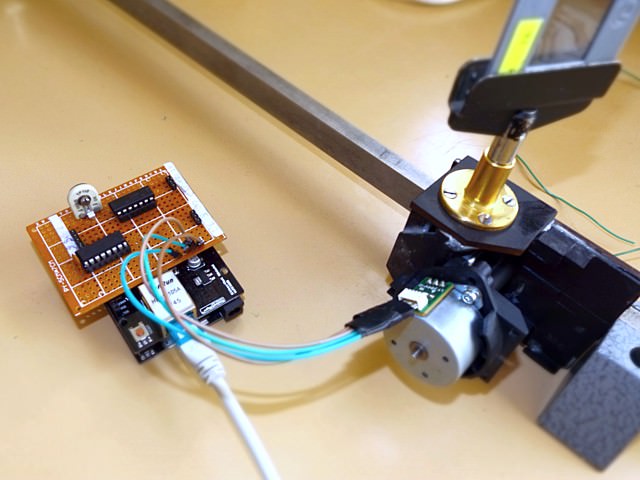
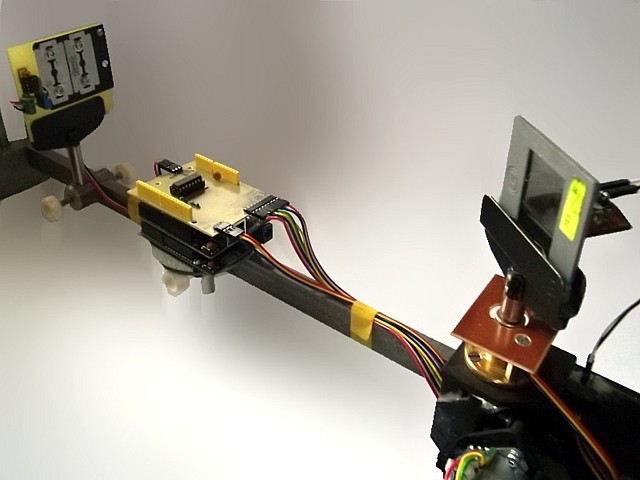
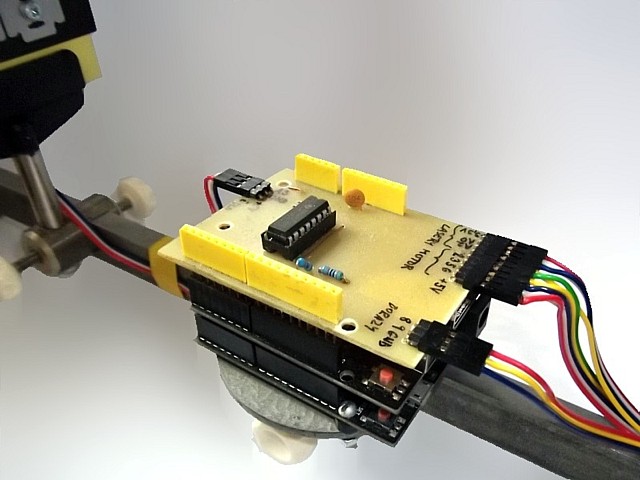
Apparatus
Work task
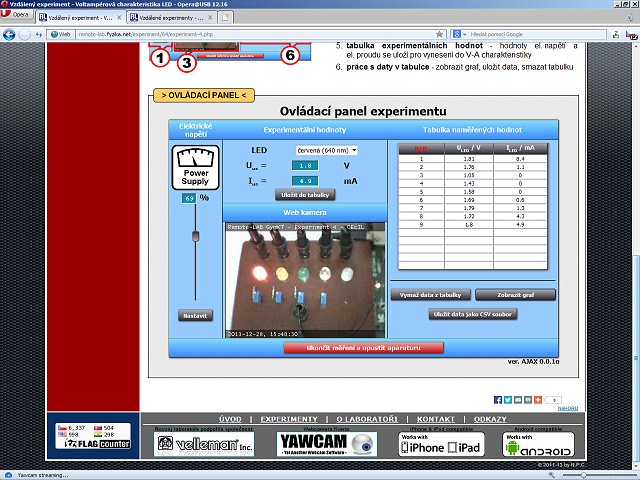
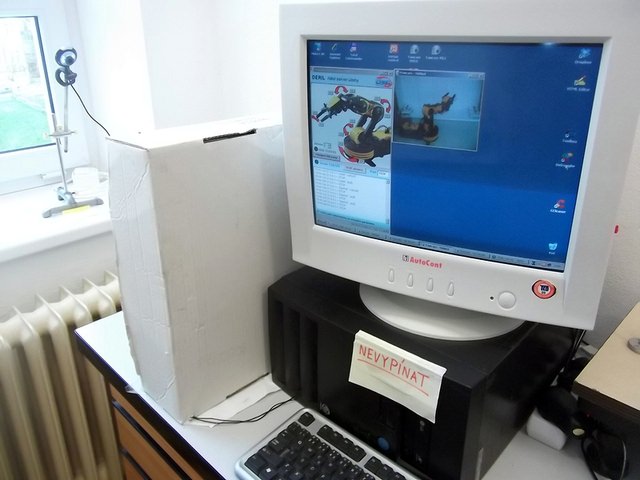
Run Experiment